
A presentation at Touraine Tech in in Tours, France by Eléa PETTON

Edge AI Allez viens, on embarque notre intelligence artificielle ! Eléa Petton
Machine Learning Engineer AI Solutions Team @EleaPetton eleapttn Eléa PETTON
De l’idée au déploiement d’IA
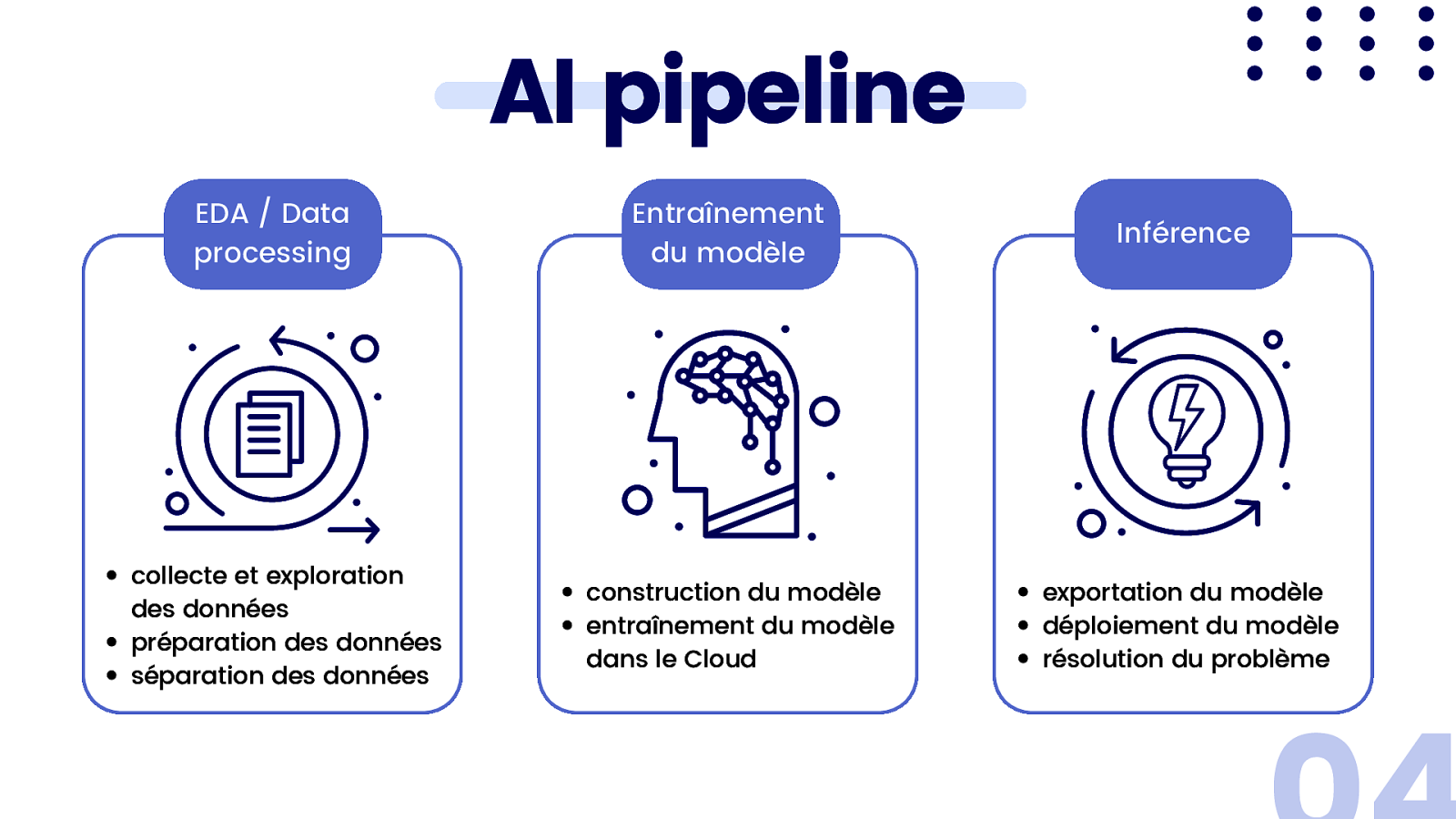
AI pipeline EDA / Data processing collecte et exploration des données préparation des données séparation des données Entraînement du modèle construction du modèle entraînement du modèle dans le Cloud Inférence exportation du modèle déploiement du modèle résolution du problème
Qu’est-ce que l’Edge AI ?
Edge AI [Edge Computing] + [AI] = [Edge AI]
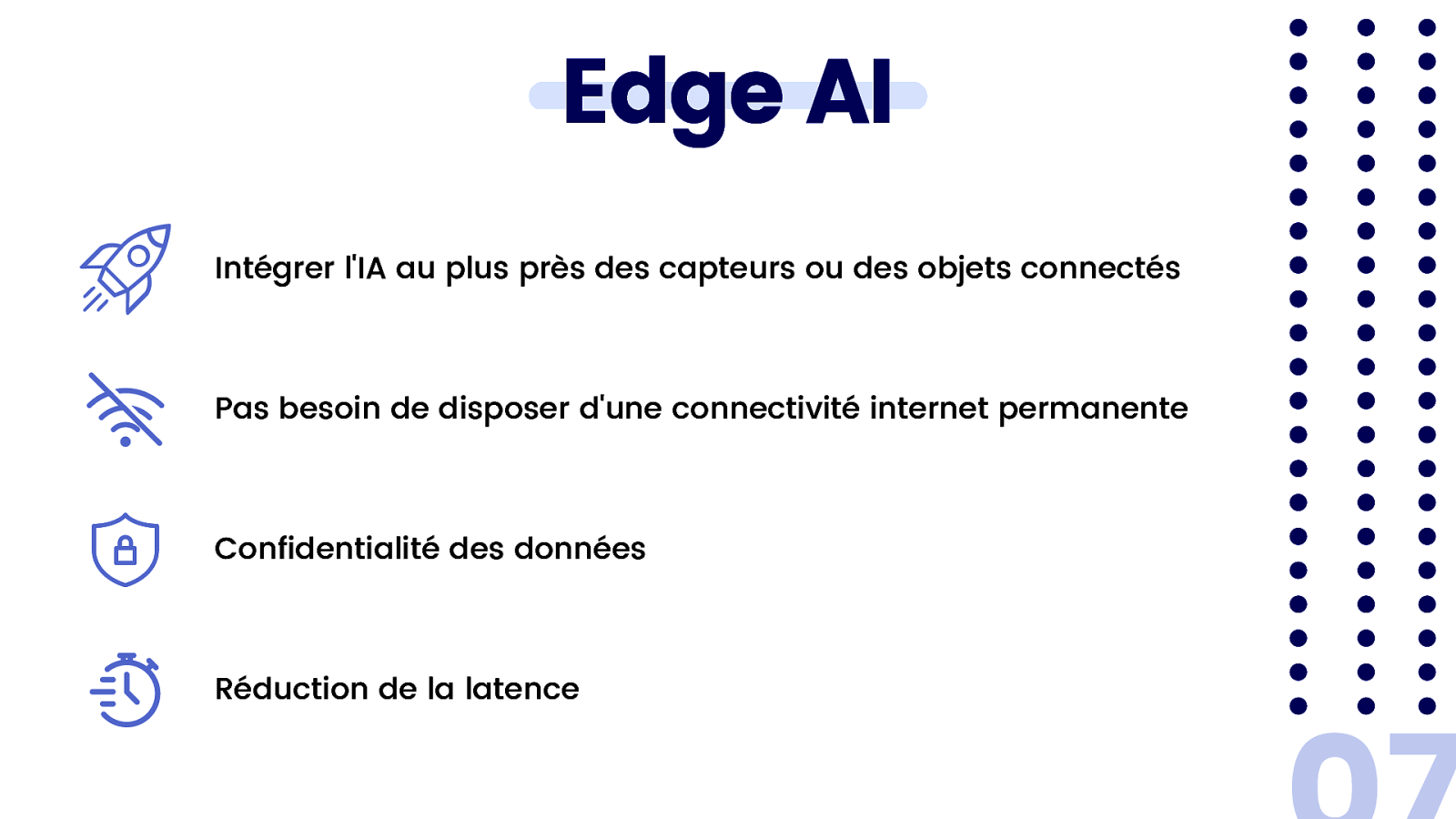
Edge AI Intégrer l’IA au plus près des capteurs ou des objets connectés Pas besoin de disposer d’une connectivité internet permanente Confidentialité des données Réduction de la latence
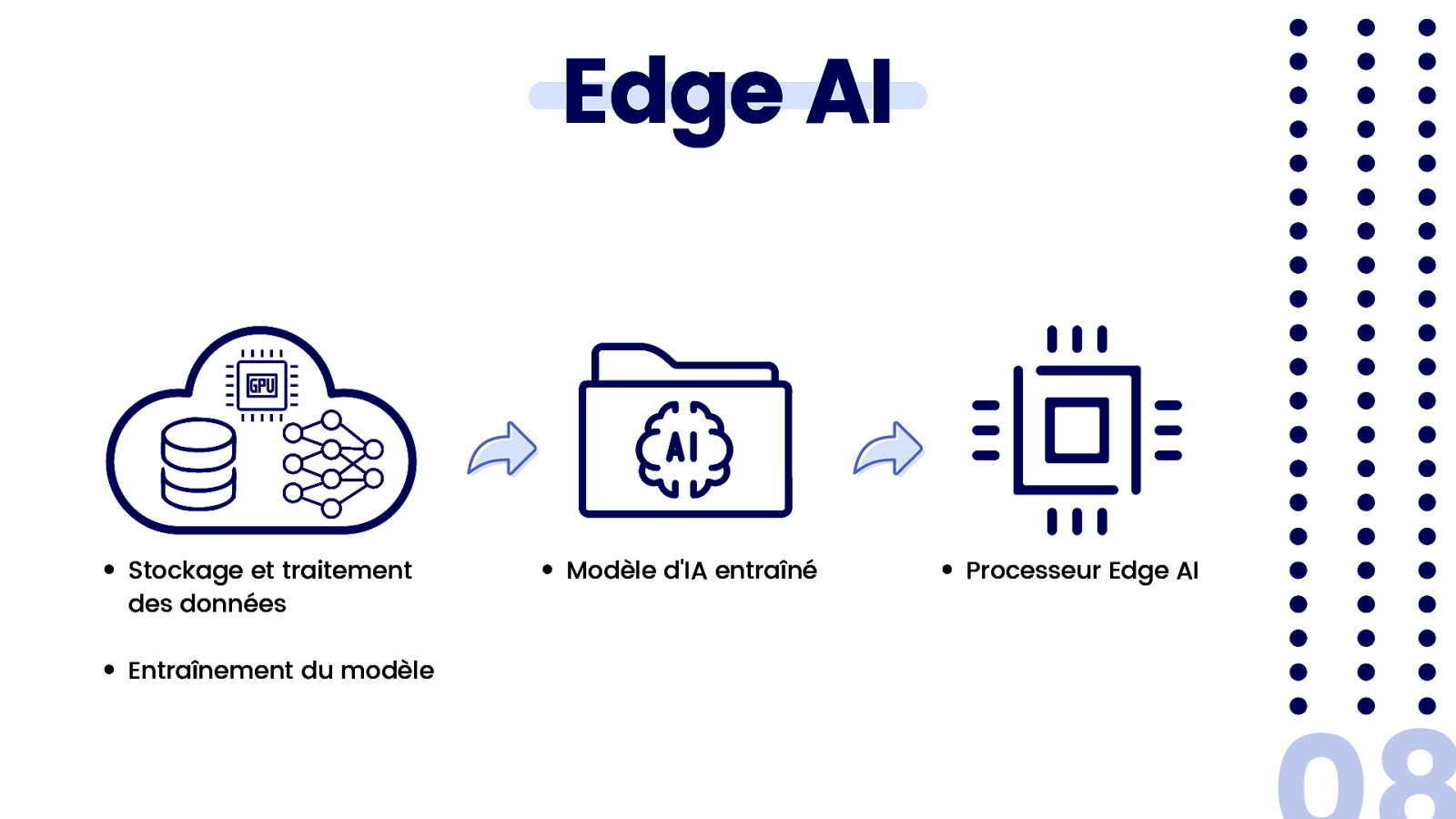
Edge AI Stockage et traitement des données Entraînement du modèle Modèle d’IA entraîné Processeur Edge AI
L’Edge AI en quelques chiffres Le marché mondial des logiciels d’Edge AI devrait atteindre 3,1 milliards de dollars d’ici 2027 ActuAI, d’après le Research Dive - institution indienne spécialisée dans les études de marché
Parlons d’Edge Computing
Pourquoi l’Edge Computing ? 1 Diminution de la latence de traitement des données 2 Augmentation de la sécurité informatique 3 Amélioration de la fiabilité et la résilience 4 Prise en charge des applications AI/ML
Et dans la vie courante… Supermarché autonome Smart homes Médical Industrie Smart cities Voiture autonome
Edge Computing et Cloud Computing
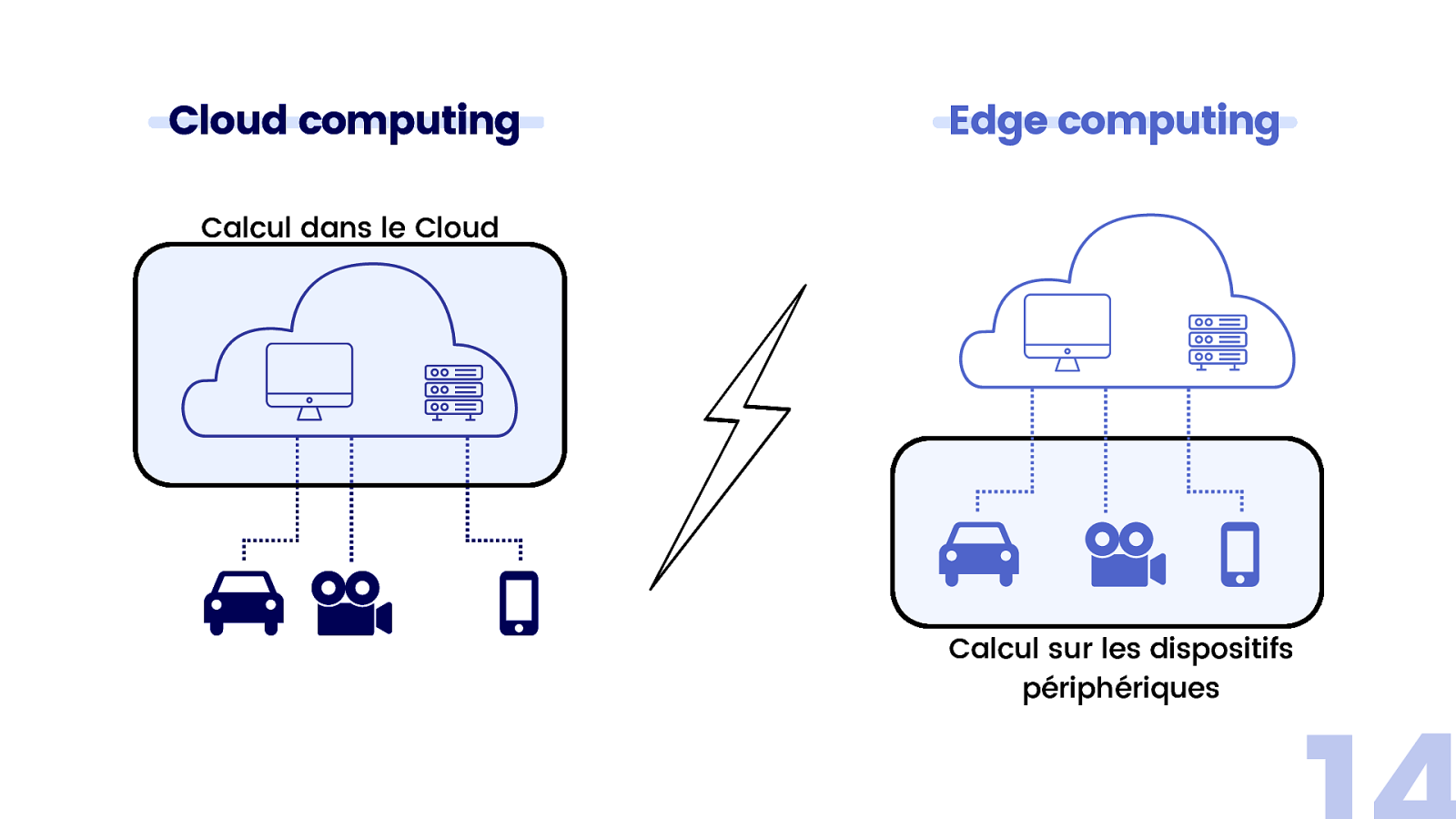
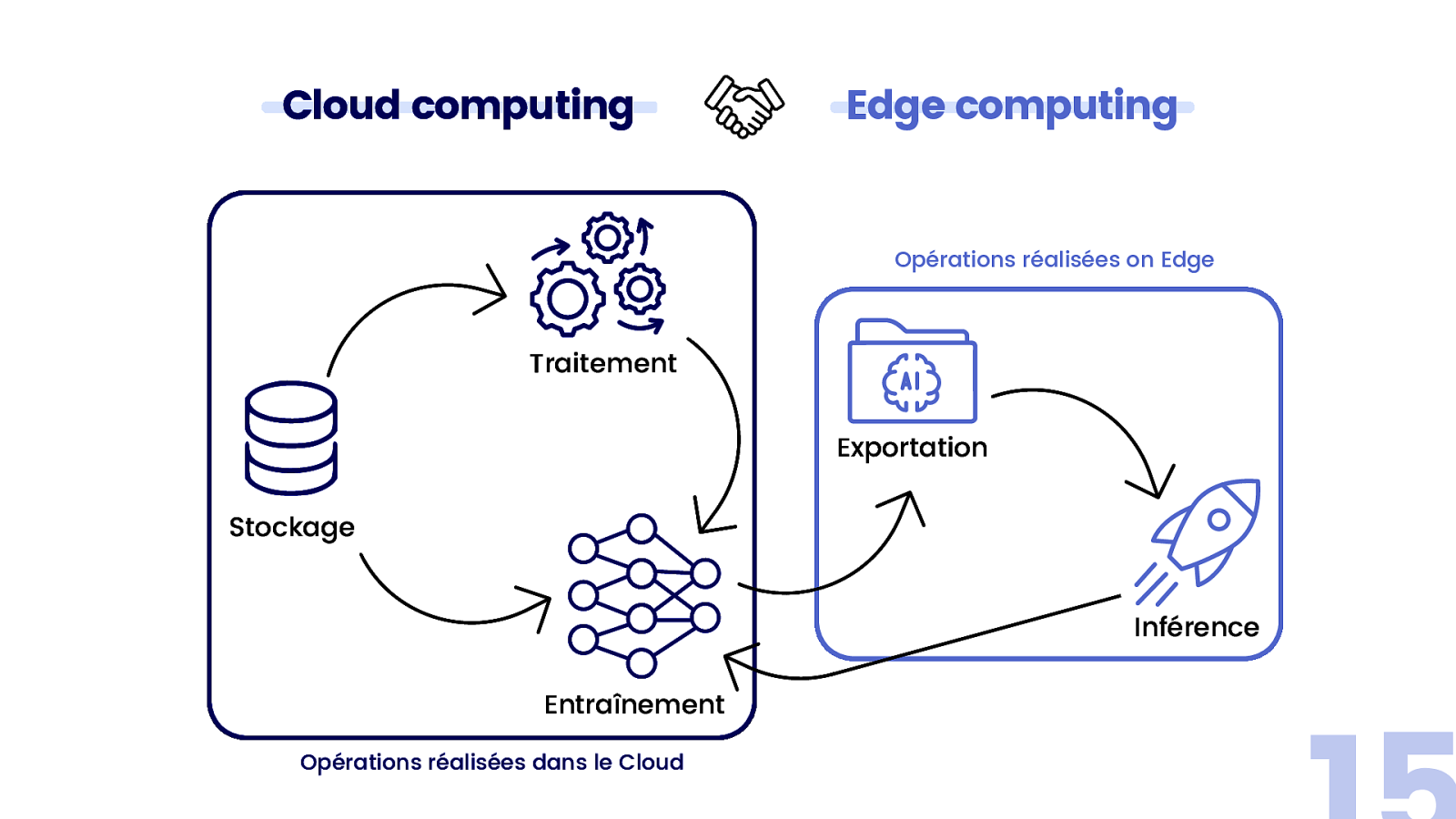
Cloud computing Edge computing Calcul dans le Cloud Calcul sur les dispositifs périphériques
Cloud computing Edge computing Opérations réalisées on Edge Traitement Exportation Stockage Inférence Entraînement Opérations réalisées dans le Cloud
Les avantages de l’Edge AI
Faible latence services de Deep Learning déployés à proximité des utilisateurs réduction considérable de la latence réduction du coût de l’envoi des données vers le Cloud
Confidentialité données brutes stockées localement sur les appareils de périphérie ou les appareils des utilisateurs confidentialité améliorée
Fiabilité nécessité de disposer de services intelligents extrêmement fiables maintien des services lorsque les connexions réseau sont perdues
Raspberry Pi 4
Raspberry Pi 4 Qu’est-ce qu’un Raspberry Pi ? Nano-ordinateur monocarte Raspberry Pi 4 Model B
Raspberry Pi 4 Les avantages des Raspberry Pi Importantes capacités de traitement Faible encombrement Faibles besoins en énergie
Raspberry Pi 4 + IA ? Peut-on déployer des modèles d’IA sur Raspberry Pi 4 ? Mise en œuvre d’applications de Machine Learning Déploiement de modèles personnalisés
Raspberry Pi 4 + IA ? Adaptation aux systèmes d’IA à hautes performances Un assistant IA Un outil de reconnaissance ou de détection Une station météo Un système de sécurité Un drone autonome
PEN 0.96 YOLOv7 sur RPI4
YOLOv7 You Only Look Once Famille d’algorithmes Reconnaissance d’objets variés sur des images et vidéos Détection temps réel Rapidité + précision
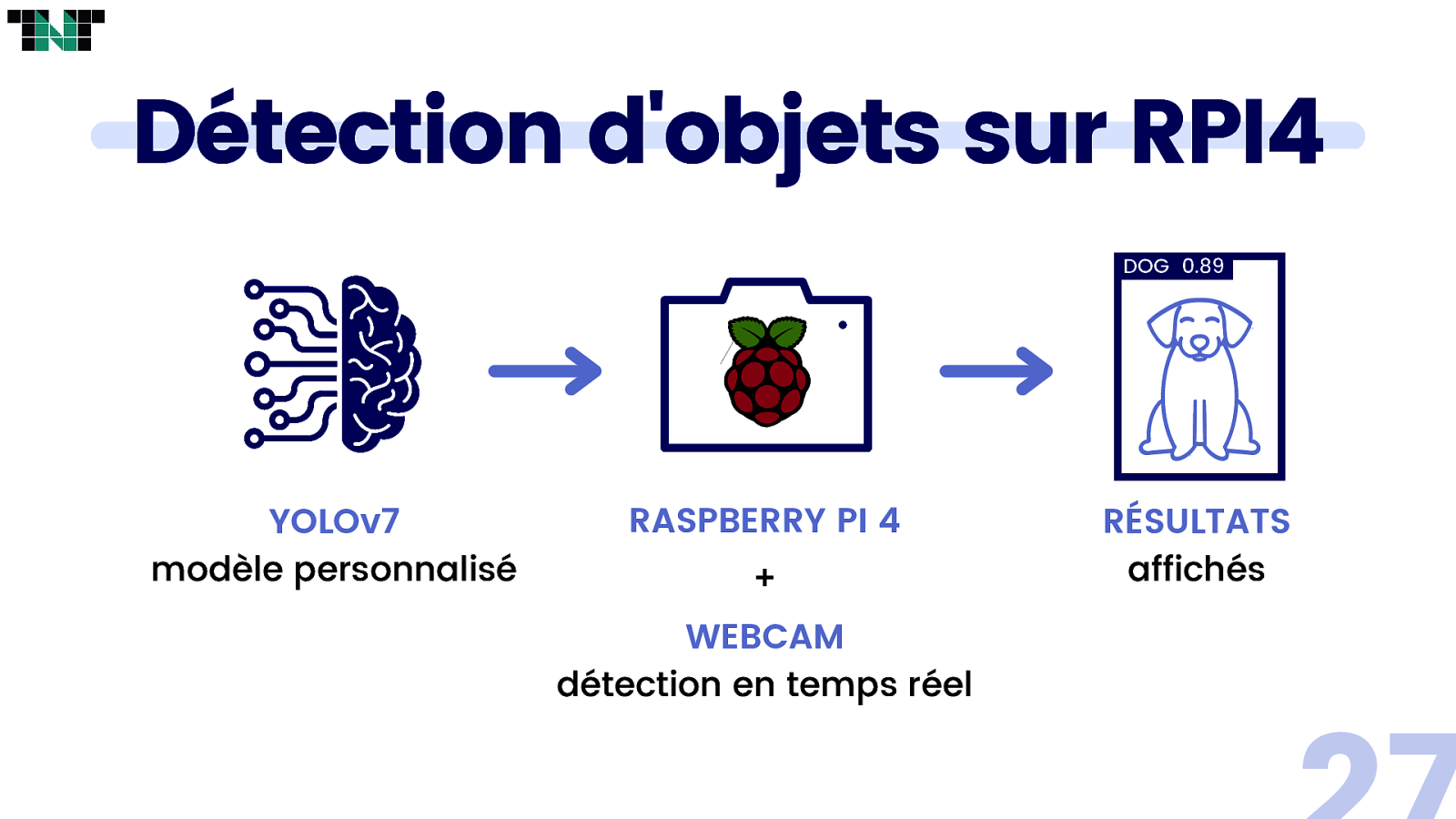
Détection d’objets sur RPI4 DOG 0.89 YOLOv7 modèle personnalisé RASPBERRY PI 4 + WEBCAM détection en temps réel RÉSULTATS affichés
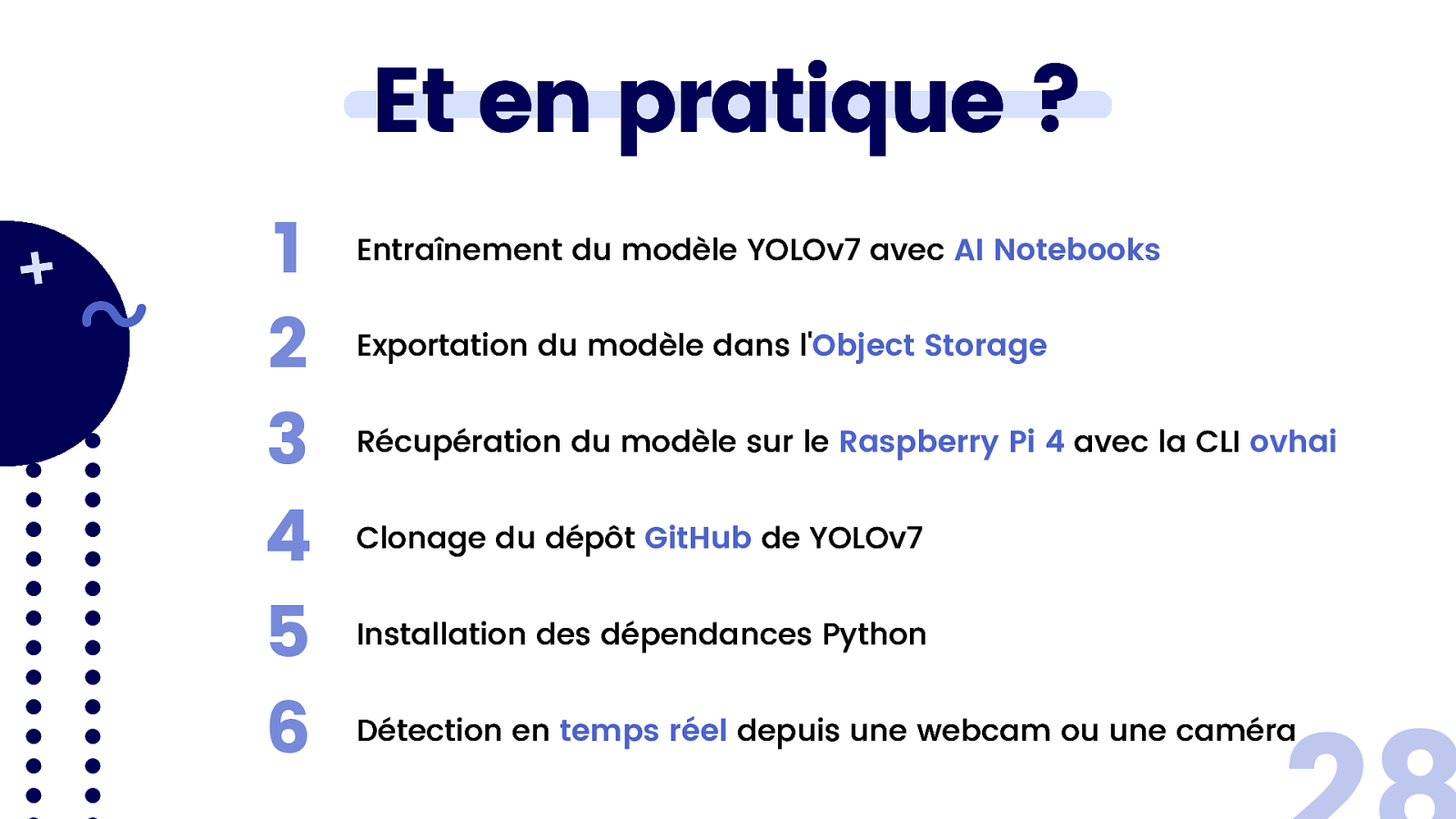
Et en pratique ? 1 2 3 4 5 6 Entraînement du modèle YOLOv7 avec AI Notebooks Exportation du modèle dans l’Object Storage Récupération du modèle sur le Raspberry Pi 4 avec la CLI ovhai Clonage du dépôt GitHub de YOLOv7 Installation des dépendances Python Détection en temps réel depuis une webcam ou une caméra
Entraînement de YOLOv7
Déploiement du modèle YOLOv7 sur RPI4
Qu’avons-nous appris aujourd’hui ?
Qu’avons-nous appris ? Notion d’Edge AI AI Notebooks Edge Computing, Cloud Computing, IA embarquée Entraînement et exportation d’un modèle dans le Cloud Raspberry Pi 4 Déploiement sur RPI4 Adaptation aux systèmes d’IA à hautes performances Récupération du modèle, installation des dépendances YOLOv7 YOLOv7 Détection en temps-réel Algorithme de détection d’objets Reconnaissance d’objets, sauvegarde des résultats
e lp ou ep cl ra @ C R I E ! M y n a ir tt B It n s Lo @ x ags d l i @w @aure lievach e @titimob y
Avez-vous des questions ?
Ressources What Is Edge AI and How Does It Work? - https://blogs.nvidia.com/blog/2022/02/17/what-is-edge-ai/ Edge AI is Overtaking Cloud Computing for Deep Learning Applications - https://embeddedcomputing.com/technology/iot/edgecomputing/edge-ai-is-overtaking-cloud-computing-for-deep-learning-applications Article sur l’EdgeAI par ActuAI - https://www.actuia.com/actualite/ledge-ai-la-technologie-en-plein-essor-qui-mele-intelligence-artificielle-etedge-computing/ Etude de marché sur l’EdgeAI par Research Dive - https://www.researchdive.com/6080/edge-ai-hardware-market Raspberry Pi 4 Model B - https://www.raspberrypi.com/products/raspberry-pi-4-model-b/ YOLOv5 Object Detection on Raspberry Pi 4 - https://www.youtube.com/watch?v=pIUFXGxR_-Q&t=3s Running YOLOv5 Machine Learning Detection on a Raspberry Pi 4 - https://jordan-johnston271.medium.com/tutorial-running-yolov5-machinelearning-detection-on-a-raspberry-pi-4-3938add0f719 Dépôt GitHub de YOLOv7 - https://github.com/WongKinYiu/yolov7 COCO dataset - https://cocodataset.org/#home Documentation des AI Tools d’OVHcloud - https://docs.ovh.com/gb/en/publiccloud/ai/ Dépôt GitHub des tutoriels AI d’OVHcloud - https://github.com/ovh/ai-training-examples Dépôt GitHub des codes et commandes de la présentation Edge AI - https://github.com/eleapttn/edge-ai-yolov7

Avez-vous déjà entendu parler du terme “AI on edge” ? Il s’agit du déploiement d’applications d’IA sur des appareils situés dans le monde physique. Les avantages ? Moins de latence, plus de sécurité, d’efficacité et surtout de la proximité ! Aujourd’hui, il devient donc de plus en plus important de pouvoir déployer des modèles d’IA capables d’inférer en temps réel.
La vision par ordinateur est particulièrement concernée de par sa progression rapide et son utilisation dans de nombreux domaines : automobile, médical, commerce, … Elle regroupe de nombreuses techniques comme la classification d’images, la segmentation d’images ou encore la détection d’objets.
Cette dernière permet d’identifier et de localiser les différents objets sur une image ou sur une vidéo. Un célèbre algorithme de détection d’objets, connu pour son fonctionnement rapide, se nomme YOLOv7.
Dans ce talk, nous verrons comment déployer un modèle YOLOv7 pour la détection d’objets sur une carte Raspberry Pi 4.
Pour cela, nous nous intéresserons à l’entraînement et au test d’un modèle YOLOv7 au sein d’un Notebook Jupyter. Nous convertirons ensuite notre modèle pour pouvoir le déployer et faire de l’inférence sur Raspberry Pi 4. La finalité ? Un outil de détection d’objets en temps réel à portée de main.
Alors, on embarque ?











 for free. You
can too.
for free. You
can too.